- Tujuan [Kembali]
- Mempermudah masuk pintu tanpa harus memegang ganggang pintu
- Menghemat waktu masuk ruangan
- Alat dan Bahan [Kembali]
- Alat
- Breadboard
- Kabel USB
- Jumper
- Bahan
- Resistor 220Ω dan 1kΩ
- Arduino
- Sensor LDR
- Sensor Ultrasonic HC-SR 04
- LED
- LCD
- Motor Servo
- Dasar Teori [Kembali]
- Resistor
- Masukkan angka langsung dari kode warna Gelang ke-1 (pertama)
- Masukkan angka langsung dari kode warna Gelang ke-2
- Masukkan Jumlah nol dari kode warna Gelang ke-3 atau pangkatkan angka tersebut dengan 10 (10n)
- Merupakan Toleransi dari nilai Resistor tersebut
- Masukkan angka langsung dari kode warna Gelang ke-1 (pertama)
- Masukkan angka langsung dari kode warna Gelang ke-2
- Masukkan Jumlah nol dari kode warna Gelang ke-3
- Masukkan Jumlah nol dari kode warna Gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10n)
- Merupakan Toleransi dari nilai Resistor tersebut
- Arduino
- Komunikasi UART
- Sensor LDR
- Sensor Ultrasonic
- Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
- Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
- Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus : S = 340.t/2. dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
- LED
- LCD
- Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
- Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
- Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
- Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
- Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
- Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
- Motor servo
- Percobaan [Kembali]
- Listing program
- Master
- Slave
- Flowchart
- Master
- Slave
- Rangkaian simulasi proteus
- Hardware
- Video
- Download file:













Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan pada prkatikum ini adalah arduino mega yang menggunakan chip AVR ATmega 2560 yang memiliki fasilitas PWM, komunikasi serial, ADC, timer, interupt, SPI dan I2C. Sehingga Arduino bisa digabungkan bersama modul atau alat lain dengan protocol yang berbeda-beda. Bahasa pemograman yang digunakan adalah bahasa C. Tetapi bahasa ini sudah dipermudah menggunakan fungsi-fungsi yang sederhana sehingga lebih mudah dalam memprogramnya. Dalam memprogram arduino, kita bisa menggunakan serial komunikasi agar arduino dapat berhubungan dengan komputer ataupun aplikasi lain.

|
Microcontroller |
ATmega2560 |
|
Operating Voltage |
5V |
|
Input Voltage (recommended) |
7-12V |
|
Input Voltage (limits) |
6-20V |
|
Digital I/O Pins |
54 (of which 15 provide PWM output) |
|
Analog Input Pins |
16 |
|
DC Current per I/O Pin |
20 mA |
|
DC Current for 3.3V Pin |
50 mA |
|
Flash Memory |
256 KB of which 8 KB used by bootloader |
|
SRAM |
8 KB |
|
EEPROM |
4 KB |
|
Clock Speed |
16 MHz |
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar. Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.

Sinyal dan Bentuk LDR

Bagian-bagian LDR

Grafik Respon LDR
Dari grafik tersebut dapat disimpulkan bahwa besarnya hambatan atau resistansi dari sensor ldr dipengaruhi oleh intensitas cahaya yang diberikan, dan dapat dilihat bahwa semakin besar intensitas cahaya maka nilai resistansinya akan semakin kecil dan begitu sebaliknya.
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik)
Cara Kerja Sensor Ultrasonik:Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.

Cara Kerja Sensor Ultrasonic

Grafik Respon Sensor Ultrasonic
Berdasarkan grafik di atas dapat disimpulkan bahwa bahwa sensor ultrasonik memiliki kinerja rendah dalam pengukuranpada jarak yang rendah. Kinerja sensor memiliki hasil yang akurat untuk pengukuran jarak jauh.

LED adalah suaatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.




Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.




Rangkaian Simulasi Sebelum dijalankan
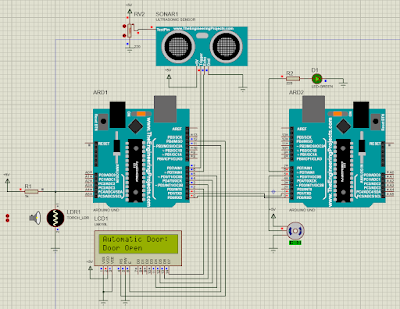
Rangkaian Simulasi Setelah dijalankan (Door Open)

Rangkaian Simulasi Setelah dijalankan (Door Closed)
Prinsip kerja dari rangkaian ini yaitu menggunakan 2 arduino, satu sabagai slave dan satu sebagai master. Kedua arduino tersebut menggunakan komunikasi UART untuk mengirimkan data. Pada rangkaian ini menggunakan 2 buah sensor yaitu sensor LDR dan sensor ultrasonic HC-SR04 yang berfungsi sebagai input dari rangkaian yang nantinya data dari kedua sensor akan diolah dari kedua arduino. Lalu, terdapat output pada rangkaian berupa LCD, LED dan motor. LCD sebagai output digital dan, motor dan LED sebagai output analog. Pada sensor ultrasonik berfungsi sebagai input digital pada arduino master, terjadi pengesetan on-off pada pin trigger, sehingga timbul pulsa ke sensor, lalu, dibaca pada pin echo high. Jarak yang diatur pada sensor ultrasonic pada program adalah 30 cm. Apabila ada objek dalam jarak 30 cm dari depan sensor ultrasonic, maka objek akan memantulkan gelombang ultrasonic yang dipancarkan oleh sensor. Sensor menangkap kembali gelombang tersebut sehingga objek terdeteksi, dan data akan diolah arduino master. Pada sensor LDR berfungsi sebagai input analog pada arduino master. Semakin besar intensitas cahaya maka semakin kecil nilai resistansinya dan begitu sebaliknya. Data yang diterima dari analog pin ke master diolah oleh arduino master dengan fungsinya sebagai ADC dan dibaca oleh sistem, dengan menggunakan rumus 5.0*analogRead(LDR)/1024. Nilai analogRead memiliki rentang 0 sampai 1023, oleh karena itu, nilainya disederhanakan dengan membagi dengan 1024 dan didapatkan nilai pembacaan LDR dengan satuan volt.
Pada program, telah diatur agar jika jarak objek pada sensor ultrasonic berjarak kecil dari 30 cm dan hasil dari LDR mendeteksi cahaya maka arduino master akan mengirim logika 2 ke slave dan lcd menampilkan “DOOR OPENED”. Jika salah satu atau kedua kondisi tidak terpenuhi, maka master mengirim data secara serial ke slave dengan kode 1 maka akan menampilkan “DOOR CLOSED” pada LCD. Pada arduino slave akan menerima data serial yang dikirimkan oleh arduino master, pada saat data serial yang dibaca kode 1, maka arduino slave akan memerintahkan LED untuk menyala yang merupakan pertanda bahwa pintu terbuka dan motor servo bergerak menuju ke 160 derajat, dan jika sebaliknya yang dibaca selain kode 1, maka LED akan mati dan motor servo akan menuju ke 0 derajat. Keadaan LED dan perputaran motor servo digunakan sebagai penanda pintu terbuka atau tertutup.



Tidak ada komentar:
Posting Komentar